侦查机器人科研平台
多传感感知与移动式数据采集平台
该平台用于复杂环境下的感知、侦测与信息采集相关研究, 采用电驱动高机动底盘结构,支持在非结构化地形条件下稳定运行。 平台支持多类型传感器集成,并可扩展高位安装结构, 用于拓展观测视角与感知范围。
平台能力
- 支持多模态传感器集成与同步数据采集
- 可扩展高位传感部署结构
- 支持远程控制与数据实时回传
- 支持本地与离线数据存储
科研应用方向
- 多源传感器融合与信息处理算法验证
- 目标识别、环境建模与数据采集实验
- 通信链路与信息安全相关研究
- 感知系统软硬件联合测试
平台支持根据科研任务对传感配置与接口形式进行调整。
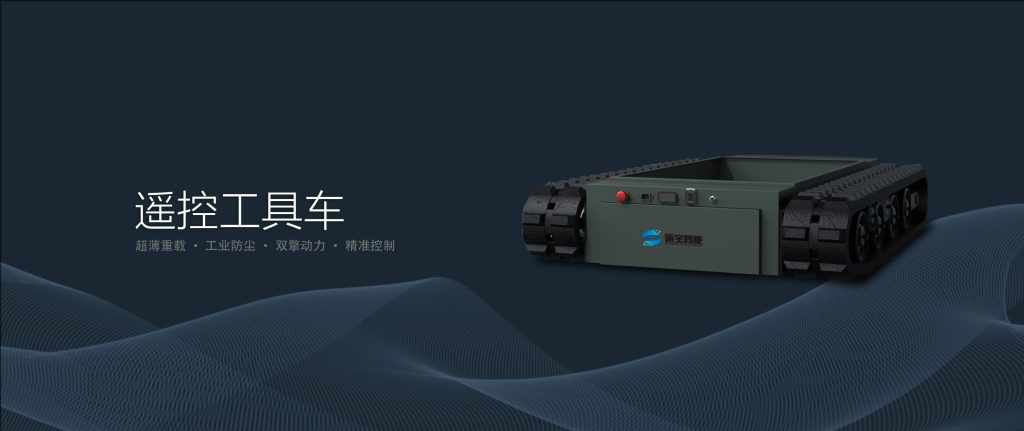
获取技术参数说明 →突击机器人科研验证平台
无人系统机动性与控制算法验证载体
该平台采用履带式高机动底盘结构, 适用于复杂地形条件下的无人系统控制与协同研究。 平台设计重点在于运动稳定性、系统扩展能力与控制接口开放性, 便于开展多类型控制算法与系统架构验证。
平台能力
- 履带式底盘结构,适应复杂地形条件
- 支持遥控与无人控制模式切换
- 模块化任务与载荷安装接口
- 预留算力与电源扩展空间
科研应用方向
- 无人系统路径规划与运动控制研究
- 人机协同与多平台协同控制验证
- 智能决策与控制算法测试
- 无人系统工程化结构验证
适用于无人系统控制与协同相关科研课题的实验验证。
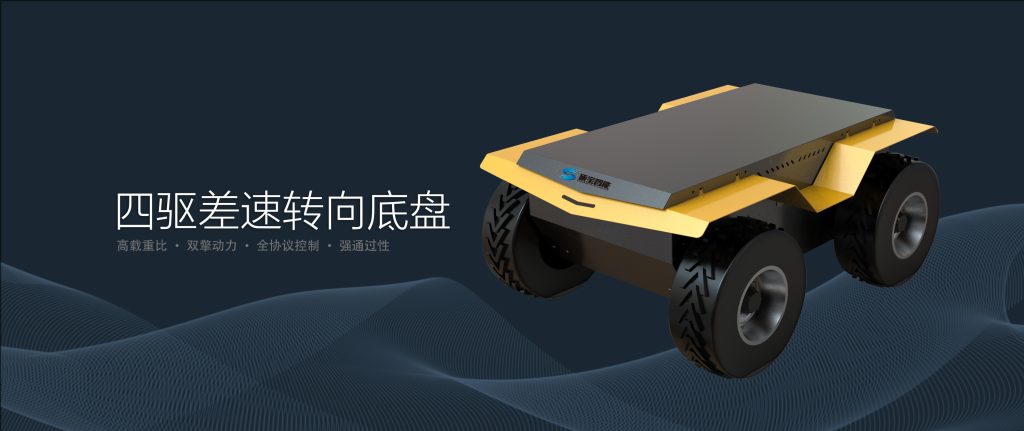
预约技术交流 →保障机器人科研平台
无人运输与自动驾驶技术实验平台
该平台面向无人运输、自动驾驶与智能保障系统研究, 采用高强度结构设计,可在复杂路况条件下稳定运行, 满足科研实验中对载重能力与系统可靠性的要求。
平台能力
- 支持较大载荷的无人运输实验
- 可集成多类型定位与环境感知模块
- 支持自动导航与路径规划功能验证
- 具备任务执行与状态反馈能力
科研应用方向
- 自动驾驶与路径规划算法研究
- 无人后勤与物资调度系统验证
- 应急保障与无人运输实验
- 智能保障系统工程化测试
平台可根据实验需求对导航与控制模块进行定制配置。
查看平台配置说明 →信息与心理作业机器人科研平台
信息传播与智能交互系统研究载体
该平台面向信息传播、心理作业与智能交互系统相关研究, 提供可移动、可控制的信息输出载体, 适用于复杂环境下的信息投送与传播策略实验。
平台能力
- 支持多形式信息输出与远程控制
- 可配置定向传播与任务调度功能
- 支持运行状态与效果监测
- 系统结构便于二次开发与功能扩展
科研应用方向
- 信息传播与心理作业策略研究
- 多语言播报与内容控制系统开发
- 智能交互系统验证
- 信息系统集成与测试
平台支持按研究方向对信息输出与控制模块进行调整。
联系技术人员 →