4WD Robot Chassis: Autonomous Mobile Platform for Off-Road Inspection & Surveying (CAN/RS232 Ready)
In the rapidly growing applications of power inspection, geological surveying, security patrolling, and unmanned system upgrades, the 4WD differential-drive unmanned vehicle chassis (UGV) has gradually become an industry standard. As the most critical hardware foundation of mobile robots, the performance of the chassis directly determines project reliability, terrain capability, load capacity, and the complexity of secondary development.
This article provides a detailed analysis of the technical structure, application scenarios, control methods, and development interfaces (CAN / RS232) to help developers, research institutions, and project integrators quickly understand the value and compatibility of the four-wheel-drive differential UGV chassis.
I.Why Four-Wheel-Drive Differential UGV Chassis Is the Mainstream Choice?
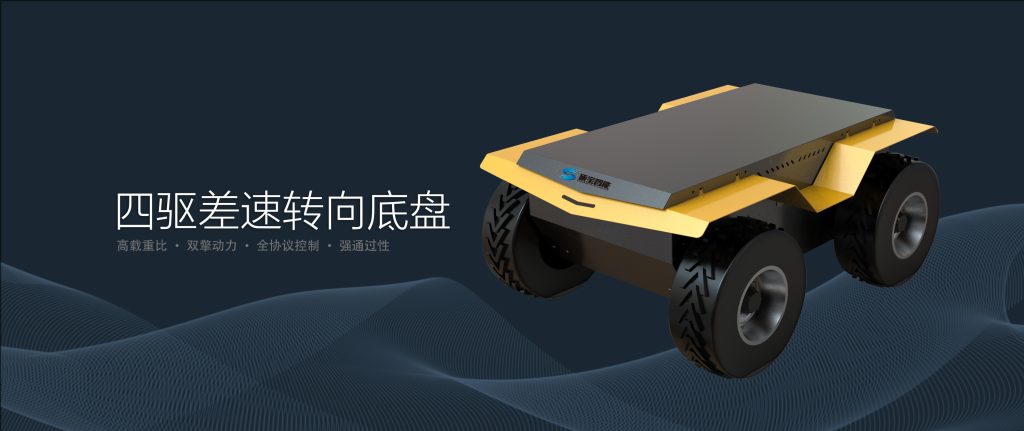
1. Greater Power: Four-Wheel-Drive Differential Suited for Complex Terrain
Compared to traditional front-wheel-drive or two-wheel-drive designs, the four-wheel-drive differential chassis offers higher torque and traction, enabling the unmanned vehicle to traverse the following terrains stably:
Gravel road
Mountainous slopes
Forest obstacles
Construction site
Off-road agricultural terrain
This is also the core reason why inspection robots and off-road survey UGVs widely adopt a four-wheel-drive differential layout.
2. Industrial-Grade Load Capacity, Ideal for Engineering Projects and Equipment Integration
Depending on project requirements, the chassis can support:
0–10,000 kg load capacity
Customized battery capacity
Peripheral device installation (LiDAR, camera, RTK, etc.)
Engineering-grade welded steel frame structure
For survey robot platforms equipped with multiple sensors and multiple computers, four-wheel drive differential chassis have significant advantages.
II. Multiple control modes: Remote control, drive-by-wire, and autonomous navigation are all covered.
A high-quality UGV chassis must meet the development needs at different stages. Current mainstream control modes include:
1. Remote Control Mode: Rapid Testing and Deployment
Suitable for early-stage development and on-site debugging.
2. Wired control mode: Project integration standard
It can control throttle, direction, and braking actions without delay, and is the foundation of autonomous driving algorithms and inspection control systems.
3. Autonomous navigation mode (supports ROS)
The chassis can be connected to the ROS1/ROS2 system to achieve:
Laser SLAM
Path planning
Target tracking
Autonomous obstacle avoidance
For research institutions, this is a core requirement; for enterprise projects, autonomous navigation is the key to unmanned inspection.
III. Why are open development interfaces like CAN/RS232 important?
1. CAN bus: Stable and reliable industrial-grade control
CAN is suitable for industrial robots, special equipment, and autonomous driving systems.
Strong anti-interference
Stable transmission
Long communication distance
Suitable for automotive applications
Many autonomous driving controllers (NVIDIA, RoboSense, Hesai) use CAN.
2. RS232 interface: Most compatible
MCUs, ARM platforms, and traditional controllers used in scientific research still largely utilize RS232; therefore:
Quick to learn
Many compatible devices
Low secondary development cost
CAN + RS232 + Open Protocol
This allows the chassis to easily adapt to different platforms, enabling rapid project implementation.
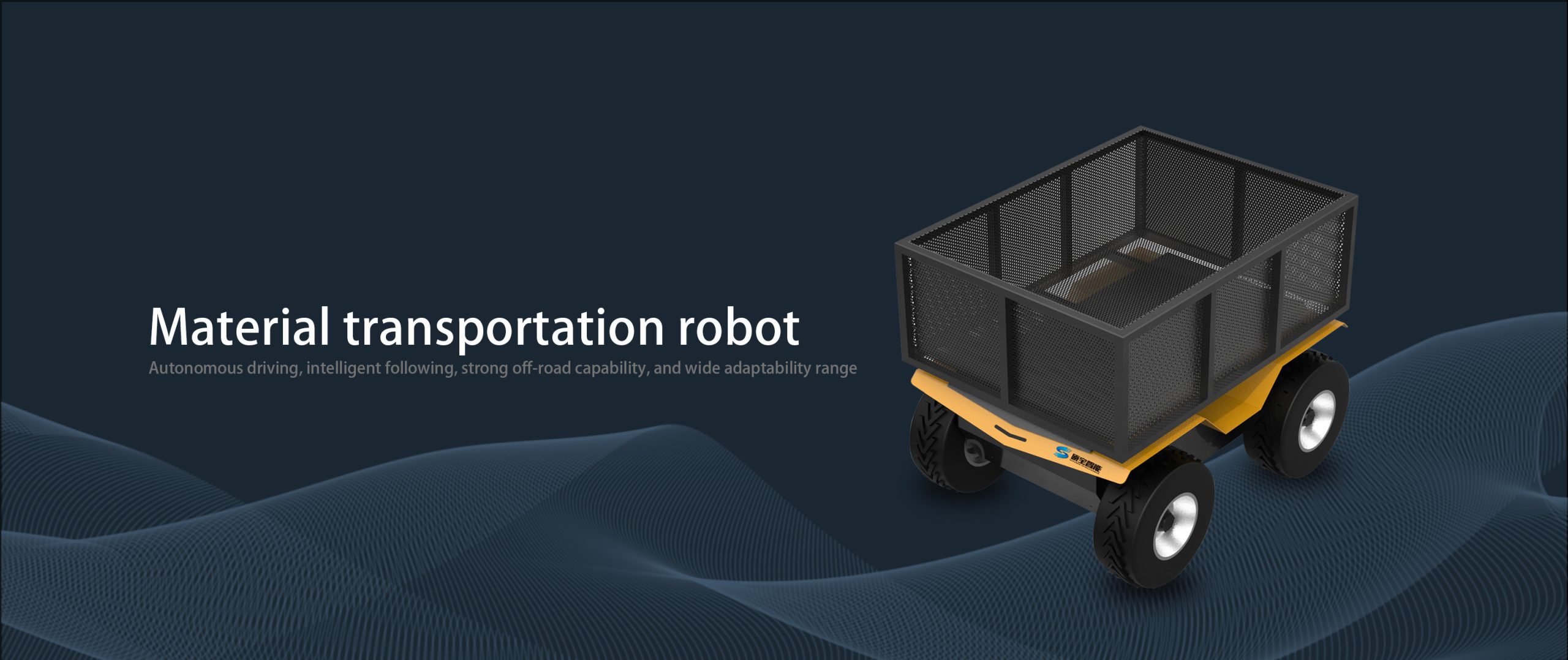
IV. Typical Applications of UGVs in Inspection and Surveying
1. Power line inspection robot
Suitable for power transmission line inspection and substation patrol.
→Supports multiple sensor integration, such as 3D LiDAR, thermal imaging, and high-definition cameras.
2. Geological survey UGV
Suitable for field geological data collection and mining exploration.
→The four-wheel drive differential provides strong power and good off-road capability.
3. Patrol of the chemical industrial park
Suitable for hazardous environment inspection and gas detection.
→ Customizable explosion-proof structure and expanded industrial sensors are available.
4. Security patrol robots
Suitable for industrial parks, schools, factories, and warehouses.
→Supports autonomous navigation and intelligent patrol algorithms.
5. Scientific research experiments and teaching
Supports ROS, CAN, and RS232, with all protocols open.
→It can be used as a platform for teaching and researching robot algorithms.
V. How to choose a suitable four-wheel drive differential autonomous vehicle chassis?
When selecting a chassis, the following parameters should be given special attention:
Load capacity (50kg? 100kg? 200kg?)
Maximum speed (1 m/s? 2 m/s?)
Motor power
Suspension type (torsion spring, independent suspension, shock absorber)
Battery capacity and battery life
Is CAN/RS232 fully open?
Does ROS support plug-and-play?
Our robot platform supports complete customization to meet the full range of applications, from scientific research needs to engineering deployment.
VI. Why choose us?
Self-developed four-wheel drive differential chassis
Supports integration with autonomous driving systems
Complete CAN/RS232 development documentation
SDK and sample code are provided.
Supports complete machine customization and structural modification
One-on-one technical support from engineers
Compatible with LiDAR, RTK, depth cameras and other devices
Help enterprises and research institutions quickly develop inspection robots, surveying UGVs, and off-road unmanned vehicles.
VII. Conclusion
The four-wheel drive differential unmanned vehicle chassis is the core foundation for future inspection robots, geological survey UGVs, and intelligent security platforms.
With its open CAN/RS232 communication interface, excellent off-road performance, scalability, and industrial-grade stability, it has become the preferred chassis platform for many research institutions and engineering projects.
If you are looking for an autonomous navigation, off-road inspection, or surveying robot platform, please contact us. We will provide you with complete technical solutions and customized support.